🔗 Navigation
- Home
- The Challenge
- General System
- Software Subsystem
- Mechanical Subsystem
- Electrical Subsystem
- Thermal Subsystem
- End User Documentation & BOM
- Areas for Improvement
General System
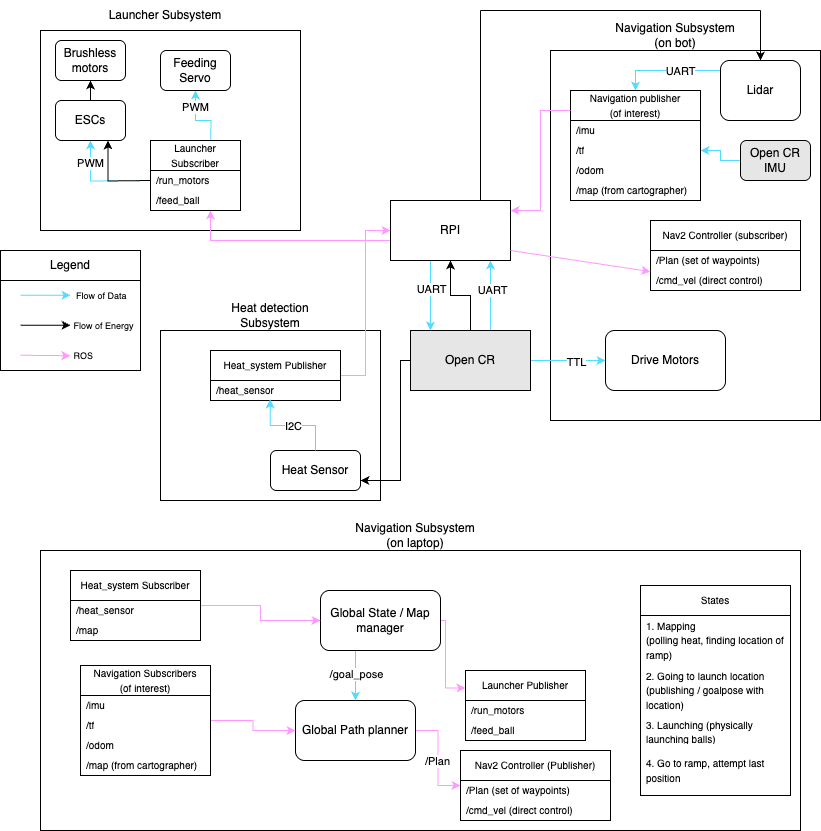
We have decomposed the system into four interdependent subsystems:
-
Navigation (Bot)
Handles real-time path planning, localization (via LIDAR and odometry), and map generation using the ROS2 Nav2 stack. -
Navigation (Laptop)
Visualizes map data, monitors robot state via RViz and topics, and can support external decision logging or override mechanisms. -
Heat Detection
Uses dual AMG8833 thermal sensors, feeding temperature grids into the controller. Detection triggers further localization using filtered LIDAR data to identify global heat source coordinates. -
Launcher
A dual flywheel launching mechanism actuated by motor commands. The launcher is synchronized with navigation goals to engage detected heat targets.
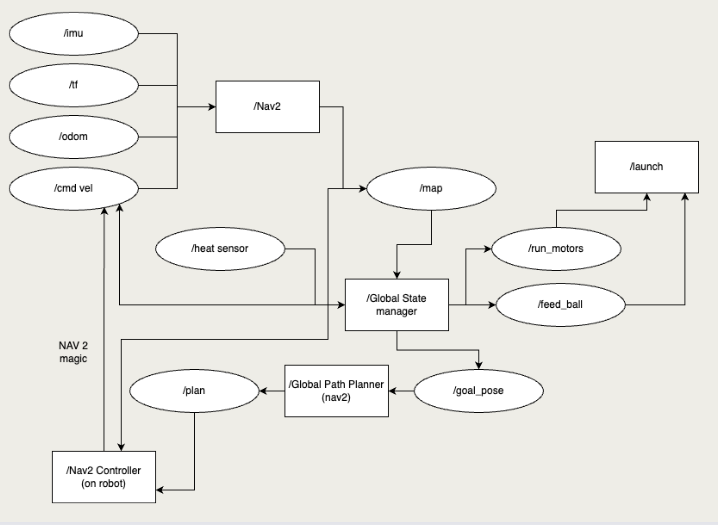
Each Subsystem is controlled by a global controller that handles all high level logic, this was conveyed to each subsystem using ROS2 Topics, the RQT graph for communication is below:
GlobalController: The Brain of the Bot
The GlobalController Python node runs in multi-threaded execution, enabling:
- Sensor polling at 10 Hz via the fast loop for IMU, LIDAR, and temperature grid updates
- State decision-making at 1 Hz in the control loop
- Concurrent execution of callbacks and services
It handles:
- State transitions across states such as:
Exploratory_MappingGoal_NavigationLaunching_BallsImu_InterruptAttempting_Ramp
- Autonomous heat source targeting using a KMeans-based clustering algorithm
Concurrency & Multithreading
The node leverages a MultiThreadedExecutor with concurrent timers and sensor callbacks, ensuring responsive, real-time robot control:
- Fast Loop (10 Hz):
Executed usingself.fast_timer, this loop:- Monitors IMU pitch changes for hazard detection
- Quickly cancels active goals if a ramp or incline is detected (
Imu_Interrupt) - Publishes live visualization markers (
publish_visualization_markers) - Avoids blocking calls to ensure low-latency sensor response
- Control Loop (1 Hz):
Executed usingself.control_loop_timer, this loop:- Makes high-level decisions based on current FSM state
- Triggers frontier exploration (
dijk_mover), goal navigation, and ramp handling - Performs goal planning and ball launching logic
System Flow Overview
-
Startup Phase
Upon initialization, the robot begins in theInitializingstate, waiting for valid map and sensor data. Once available, it enters theExploratory_Mappingphase. -
Exploration Phase
The robot autonomously explores the maze using frontier-based navigation. As thermal targets are detected, their global coordinates are recorded and visualized in RViz. -
Clustering & Goal Planning
After the map is completed, detected heat points are clustered into goal positions. The robot then sequentially navigates to each target. -
Launching Phase
At each goal, the robot stops, aligns itself, and launches a ping pong ball toward the heat source using the dual flywheel launcher. -
IMU Interrupt Handling
During any phase, if a pitch anomaly is detected (e.g., going up a ramp), the system triggers theImu_Interruptstate. The robot cancels current goals, marks unsafe zones in the occupancy grid, and replans its route. -
Ramp Engagement (Optional)
If enabled, after all heat targets are engaged, the robot attempts to approach a ramp zone and perform a final launch
Sensor Fusion & Decision Logic
-
Thermal + LIDAR Fusion
When heat is detected, a laser scan in the direction of the sensor’s FOV is filtered and binned. The average angle and distance are computed and transformed into world coordinates. -
IMU Feedback Loop
Pitch data is processed in real-time. A rolling average is used to detect sudden inclinations that may signal a ramp or collision. -
Occupancy Grid Manipulation
The robot actively updates its map, sealing off dangerous or previously explored zones using adaptive flood-fill techniques and direct occupancy marking.
Communication Infrastructure
All modules interact via ROS2 topics with appropriate QoS profiles. Key topics include:
cmd_vel: Motion commandsscan: Laser dataodom: Odometrytemperature_sensor_1/2: Heat grid dataflywheel: Launch trigger/visualization_markers: Real-time RViz feedback for heat and sealed regions
Communication is optimized for real-time response and modularity, with feedback loops embedded into every decision node.
Why This Design?
This architecture allows us to:
- Run real-time behaviors in parallel
- Decompose complex behavior
- Replan dynamically based on ramp location, sensor feedback, or BT tree failure
Extra information on State Transitions and how they are actually defined in the code
1. Transition from Initializing → Exploratory_Mapping
def initialise(self):
self.wait_for_map()
pos = self.get_robot_global_position()
while pos is None:
pos = self.get_robot_global_position()
time.sleep(0.2)
x , y , yaw = pos
self.initial_yaw = yaw
- This method waits for an occupancy grid (
wait_for_map) and valid TF position before setting the robot’s initial orientation. - Then,
self.set_state(GlobalController.State.Exploratory_Mapping)is called in thecontrol_loop.
2. Transition to Imu_Interrupt
def fast_loop(self):
...
if self.IMU_interrupt_check() and not self.hit_ramped:
self.set_state(GlobalController.State.Imu_Interrupt)
- This transition can occur during
Exploratory_Mapping,Goal_Navigation, orGo_to_Heat_Souce. - The trigger is based on
self.recent_pitch_avg > self.imu_threshold * self.global_pitch_avgor> self.imu_abs_threshold.
3. Transition from Imu_Interrupt → Exploratory_Mapping
def control_loop(self):
...
elif bot_current_state == GlobalController.State.Imu_Interrupt:
self.hit_ramped = True
self.ramp_location = self.get_robot_grid_position()
self.mark_area_around_robot_as_occ(self.ramp_location[0], self.ramp_location[1], 7)
x ,y, yaw = self.previous_position[0]
self.nav_to_goal(x,y)
time.sleep(20)
self.set_state(GlobalController.State.Exploratory_Mapping)
- After marking the ramp location as occupied and reversing, the robot returns to mapping with the ramp avoided.
4. Transition from Exploratory_Mapping → Goal_Navigation
def control_loop(self):
...
if self.finished_mapping:
self.max_heat_locations = self.find_centers(self.clusters)
self.set_state(GlobalController.State.Goal_Navigation)
- Triggered when
self.finished_mappingisTrue(after all frontiers explored viadijk_mover()).
5. Transition to Launching_Balls
def control_loop(self):
...
for location in self.max_heat_locations:
...
self.nav_to_goal(world_x, world_y)
...
self.launch_ball()
self.set_state(GlobalController.State.Attempting_Ramp)
- The robot sends a Nav2 goal, then launches a ping pong ball at each goal location.
- This implicitly represents the
Launching_Ballsstate as a sub-action before transitioning toAttempting_Ramp.
6. Transition to Attempting_Ramp
def control_loop(self):
...
elif bot_current_state == GlobalController.State.Goal_Navigation:
...
self.set_state(GlobalController.State.Attempting_Ramp)
- This happens once all heat sources in
self.max_heat_locationshave been visited.
7. Final Ascent Handling in Attempting_Ramp
def control_loop(self):
...
elif bot_current_state == GlobalController.State.Attempting_Ramp:
x,y = self.grid_to_world(self.ramp_location[0], self.ramp_location[1])
self.nav_to_goal(x , y, self.initial_yaw)
time.sleep(30)
self.run_pd_until_obstacle(self.initial_yaw)
self.launch_ball()
- The robot ascends the ramp and launches a final ball.